

Products and services

The Earth system is marked by a complex interaction of a lot of different processes, many of which are very involved and we can only explore them indirectly. Take the water cycle as an example. Water vapor in the atmosphere provides rain, but not everywhere. Latent heat from water vapor condensation is an important ingredient for severe storms, since energy is released in this condensation process. Changing ground water levels, the melting of ice-sheets and last but not least the integral effect of the ocean currents and the dynamics of sea level rise show a very complex interaction pattern. What we experience is pieced together from all contributions for angular momentum exchange between the fluids of the earth (water, ice and atmosphere) and the solid earth across the entire globe. The law of conservation of angular momentum requires, that as the axial angular momentum of the fluids increases, the rotation rate of the solid Earth decreases and vice versa.
Swapping rotational energy between the solid part of the earth and the fluids, shows up as tiny variations in the rotational velocity of the Earth, or expressed differently, causes the length of the day to change by less than one millisecond. With 86400 seconds in the full day, this amounts to a change of 1 part in 108, too small to be felt, but large enough to put limits on theories of the global interaction of geophysical processes.
How can we measure such small effects reliably? We can use telescopes to look at the universe outside of the earth and measure the duration of each revolution precisely, which provides us with one value for the instantaneous length of day per day. A network of radio telescopes, known as “Very Long Baseline Interferometry” (VLBI) is routinely used for this purpose by interferometrically observing quasars. These are very compact high energy radio sources appearing as highly position stable beacons at the perimeter of the observable universe, forming a celestial reference frame. Since we obtain highly accurate directions to these quasars, we may think of this concept as a “star compass”. Since the Global Navigation Satellite Systems (GNSS) can be tied to these VLBI measurements it can be used to deduce variations of earth rotation from the one-way range measurements of the satellite constellation with the help of a large network of globally distributed GNSS receivers.
More elegantly, we may do the same thing for the earth, that airplanes do in order to keep continuous control of the aircraft attitude. We may use a gyroscope, strapped down to the earth crust and derive the rate of rotation straight from this instrument. Unlike the observation of objects outside of the earth, this inertial rotation sensing does not require any external reference to infer the instantaneous rate of rotation of the earth. In contrast to the VLBI technique we call this gyroscope an “inertial compass”. While this approach sounds straight forward and is very intriguing, it is much easier said than done. In order to detect 1 part in 108 in the rotation rate of the Earth, such an instrument has to resolve the rotation rate of the earth with a value of 15 degrees per hour (almost 73 µrad/s), without any error to values smaller than an incredible 0.7 prad/s (pico-radian per second) over hundreds of days. Particular inertial measurement concepts have a unique set of advantages and disadvantages. All of the available concepts have systematic errors, some of which can be overcome, while others prove to be a true limitation.
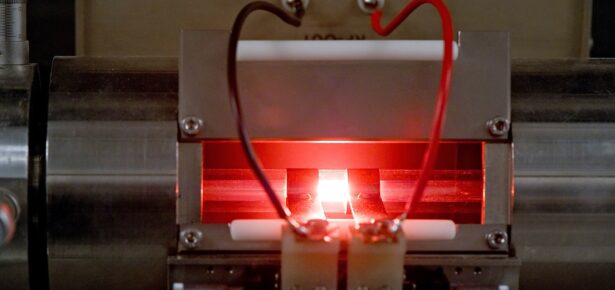
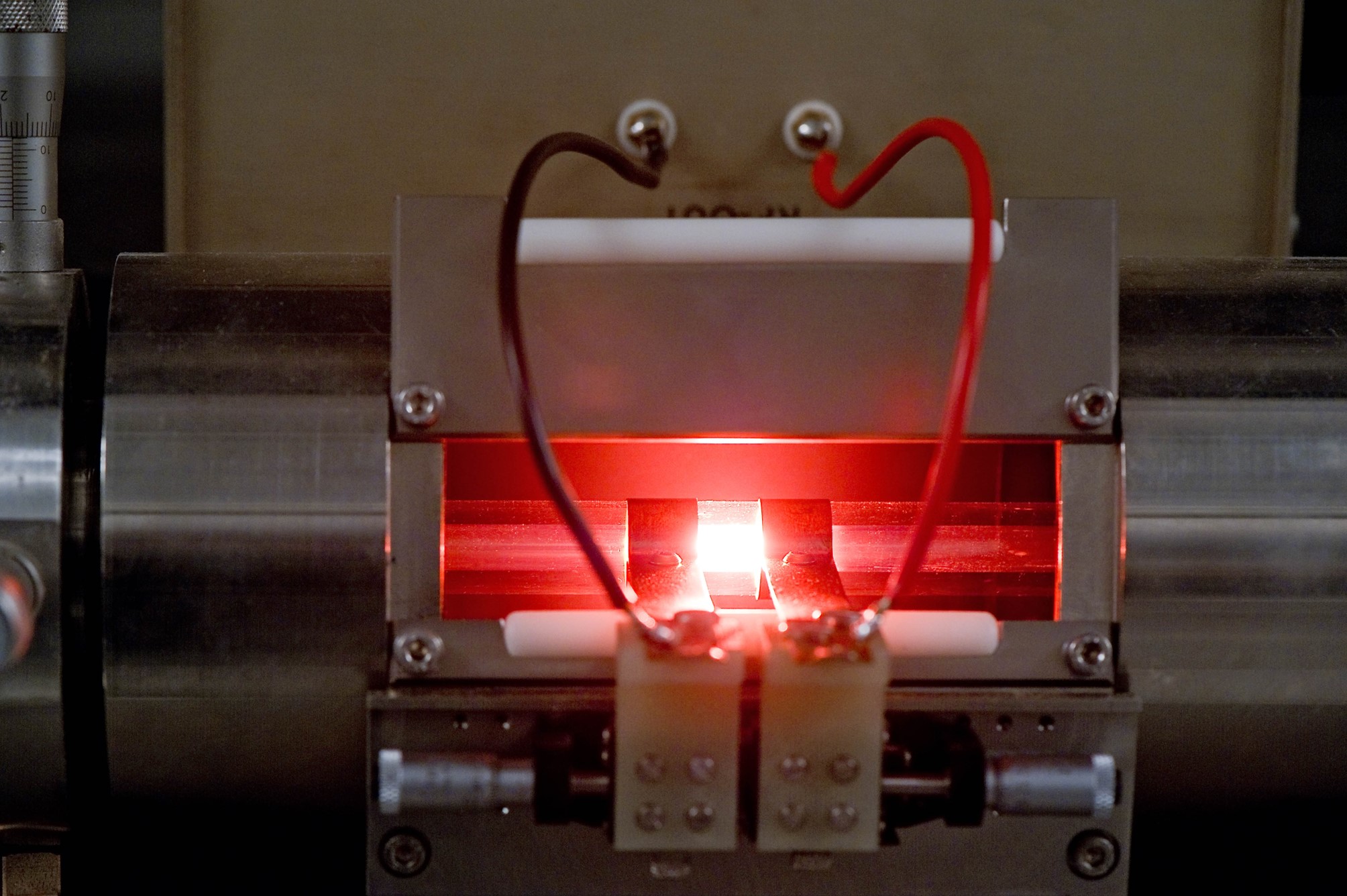
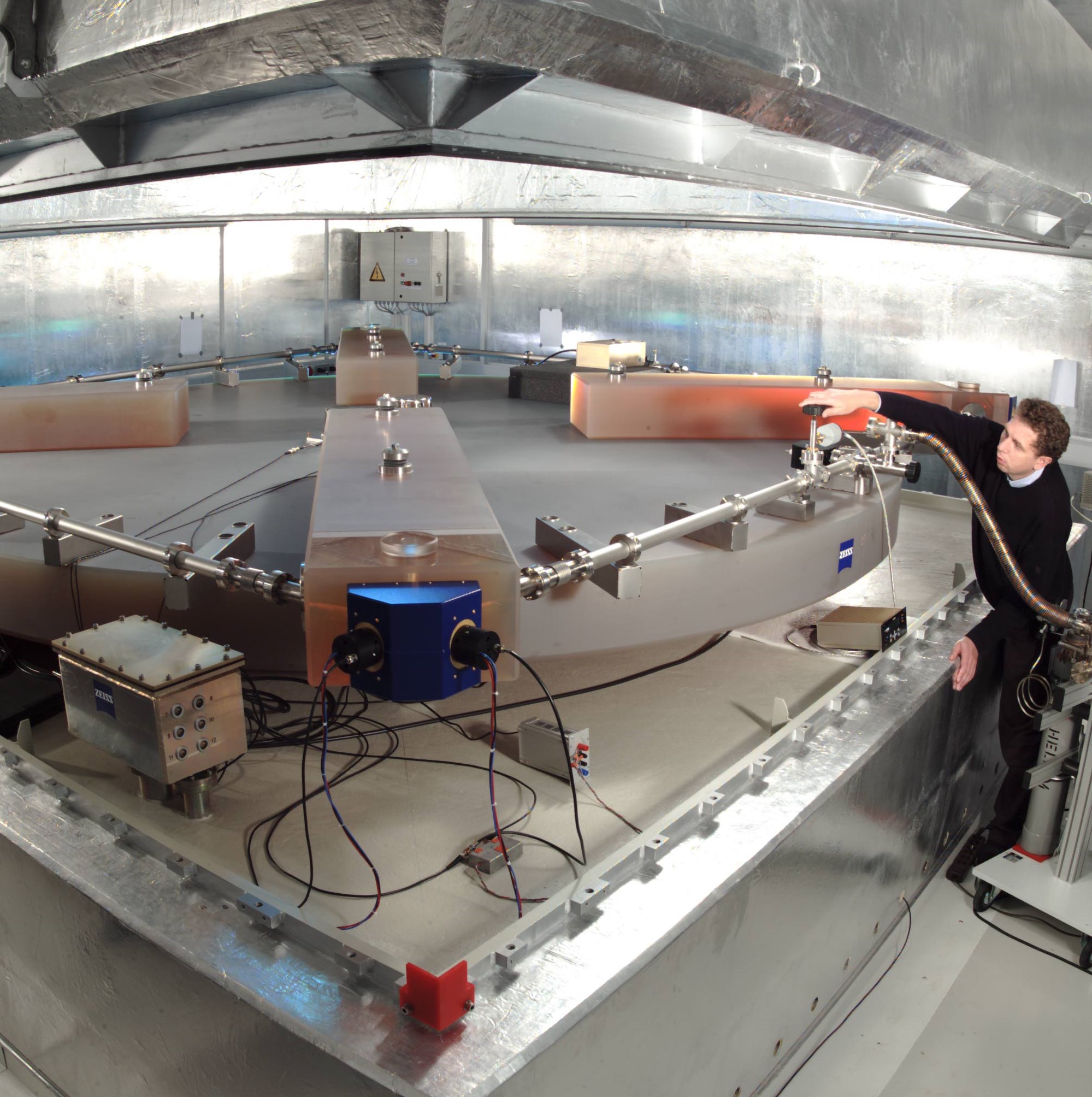
Large ring laser gyroscopes, realizing the concept of optical Sagnac interferometry, are currently the most promising candidates for such an inertial compass, which is no mean feat for an optical interferometer. There are a lot of error sources that may get in the way of this goal. Despite a lot of effort of several working groups over many decades to overcome a multitude of really tough error sources, there is only one instrument existing today, which comes close to reaching this goal. This is the gross-ring “G” at the Geodetic Observatory Wettzell in Southern Germany, utilizing a 16 m2 square cavity.
Starting from a brief overview of the early days of Sagnac interferometry, in our new book, Rotation Sensing with Large Ring Lasers, we take a careful look at each error source, which may eventually remove the systematic error sources and thus brings us to the point where we can continuously monitor the rotation rate of the Earth with a temporal resolution of far less than a day. There are three categories into which the error sources fall and we can treat them independently. First of all there are the instrumental error sources, which we sum up in a “sensor model”. Since the sensor has to provide a global measurement quantity, while it is attached to the earth crust locally, we have to make sure that we do not mix local effects, such as crustal and tidal deformation, atmospheric loading and potentially local rotation with regional or global effects. All these perturbations are taken into account in the “orientation model” of a gyroscope. The “rotation model” finally, identifies all types of signals, which are of geophysical origin. Apart from rotational Love waves caused by earthquakes, a local perturbation at some location on the globe, we continuously observe solid Earth tides and diurnal polar motion on time scales of half a day and a full sidereal day. These signals are caused by the gravitational attraction of sun and moon on a deformable earth body. The Annual wobble with a period of one year is the result of a slightly elliptical earth orbit around the sun and and the Chandler finally is a free oscillation of the Earth, excited by wind and ocean waves. It has a period of about 435 days. Taken together, the latter two effect generate a complex polar motion pattern with a diameter of up to 8 m.
Rotation sensing in the field of geophysics has many very different applications and a lot of considerable challenges. Earthquakes require a fast response, while subtleties of Earth rotation require many months of data sampling to cover one cycle. That means we look at a frequency range of at least 10 orders of magnitude. This cannot be covered by one sensor type alone. Ocean bottom seismology and structural engineering also profit from inertial rotation sensing. So the book would not be complete without looking at these applications as well. Even tests of general relativity appear feasible, if the legacy of inertial rotation sensing is continued in the future.

Title: Rotation Sensing with Large Ring Lasers
ISBN: 9781108422550
Authors: Ulrich Schreiber and Jon-Paul Wells
Ulrich Schreiber is a Professor at the Technical University of Munich. He has more than thirty years of research experience in the technology of space geodesy, in particular Satell...
View profile >Keep up with the latest from Cambridge University Press on our social media accounts.





Latest Comments
Have your say!